3 Models
By the end of this chapter, the reader will be able to:
- Distinguish between Item Response Theory, factor models, paired comparison systems (Elo, Bradley-Terry), and network models (GGM, Ising).
- Explain why the Rasch model holds a special status as “the measurement model” through the sufficiency of sum scores, specific objectivity, and test-free measurement.
- Derive the sufficiency theorem for the Rasch model and explain its implications for AI benchmark evaluation.
- Compare the prescriptive (Rasch school) and descriptive (general IRT) approaches to measurement and articulate when each is appropriate.
- Trace the historical development from Thurstone (1927) through Rasch (1960) to modern network psychometrics.
- Connect classical measurement concepts (reliability, validity, dimensionality) to contemporary AI benchmark evaluation.
- Apply measurement theory to analyze whether AI benchmarks satisfy the requirements for scientific measurement.
- Implement basic IRT models in Python and visualize item characteristic curves.
- Evaluate the assumptions underlying AI leaderboards and identify potential violations of measurement principles.
This chapter focuses on model specification: we introduce the probabilistic models used for measurement and explain what each one assumes. We do not cover how to estimate (learn) the parameters of these models—that is the subject of Chapter 4. Think of this chapter as defining the “what” (the models) and the next chapter as defining the “how” (the estimation).
A visual tour of the key concepts in this chapter — from response matrices and item characteristic curves to factor models and benchmark heterogeneity.
This chapter introduces the core notation used throughout the book: \(\theta_i\) (model ability), \(\beta_j\) (item difficulty), \(a_j\) (discrimination), \(c_j\) (guessing), \(Y_{ij}\) (binary response), and \(\sigma(\cdot)\) (logistic sigmoid). ?sec-notation collects every symbol in one place—refer to it whenever a symbol is unfamiliar. Readers coming from psychology or education may also find the translation table in Section 3.5 helpful; it maps classical psychometric terminology (test taker, item, reliability, validity) to AI evaluation counterparts.
3.1 The Measurement Problem in AI
Consider the following scenario. An evaluator has tested 100 language models on a benchmark consisting of 1,000 multiple-choice questions. Each model either answers each question correctly (1) or incorrectly (0), producing a \(100 \times 1000\) binary response matrix \(Y\). Computing each model’s accuracy—the proportion of correct answers—yields a ranking of the models.
Has anything been measured? The answer is not as obvious as it might seem. The models have certainly been scored: numbers have been assigned to them based on their performance. But measurement, in the scientific sense, requires more than assigning numbers. It requires that those numbers correspond to some underlying property—a latent construct—in a principled way. The distinction between scoring and measuring is fundamental to understanding why AI evaluation needs measurement science. Consider an analogy from physics: when the temperature of water is measured with a mercury thermometer, the height of the mercury column is a score—a number that can be read off the instrument. That score is trusted as a measurement of temperature because the relationship between mercury expansion and thermal energy is understood.
In AI evaluation, we often have scores without this deeper understanding. When GPT-4 achieves 86% accuracy on MMLU (Hendrycks et al. 2021) and Claude achieves 84%, we cannot immediately conclude that GPT-4 has more “intelligence” or “capability” than Claude. Several questions must be answered first:
What latent construct does MMLU measure? Is it general intelligence, factual knowledge, test-taking ability, or something else entirely?
Is the construct unidimensional? Can model performance be characterized by a single number, or do different questions tap into different capabilities?
Are the scores comparable across different test conditions? Would the ranking change if we used different questions from the same domain?
What is the measurement error? How much of the score difference reflects true differences in capability versus noise?
These questions have been central to psychology and education for over a century. The field of psychometrics developed sophisticated tools—Item Response Theory, factor analysis, validity frameworks—precisely to address them. AI evaluation is now confronting the same fundamental challenges.
Every AI evaluation produces a response matrix \(Y\) recording which subjects (models) answered which items correctly — see Section 2.1 for the formal definition and a discussion of its shape across benchmark types. What matters here is that the matrix contains far more information than its row means: the pattern of responses reveals structure that aggregate accuracy obscures.
When we sort the rows and columns by marginal sums, a characteristic diagonal structure emerges: high-ability models answer most questions correctly, and easy questions are answered correctly by most models. This structure is not guaranteed, but when present it suggests that a simple latent variable model may adequately describe the data.
The problems facing AI evaluation today mirror those that psychology confronted in the early 20th century:
Construct definition: What does it mean to measure “reasoning” or “common sense”? Psychology developed validity frameworks to address this question.
Test bias: Are some benchmark questions unfair to certain models due to training data or architecture? Educational testing developed differential item functioning (DIF) analysis.
Score comparability: Can we compare models evaluated on different benchmark subsets? Psychometrics developed test equating methods.
Efficiency: How can we evaluate models with fewer questions? Computerized adaptive testing (CAT) emerged from IRT.
Reliability: How stable are our rankings under different conditions? Test-retest reliability and standard error of measurement quantify this.
The tools developed in psychometrics are directly applicable to AI evaluation: the statistical models that describe human test performance can describe AI benchmark performance.
3.2 Probabilistic Models for Measurement
Measurement requires a model connecting observable responses to latent constructs. This section surveys the major families of probabilistic models used in measurement: Item Response Theory, factor models, paired comparison systems, network models, and hierarchical models. These models provide the statistical machinery for extracting latent variables from response data.
3.2.1 Item Response Theory
Item Response Theory (IRT) models the probability of a correct response as a function of person ability and item characteristics. The key insight is that both persons and items can be characterized by parameters on a common scale.
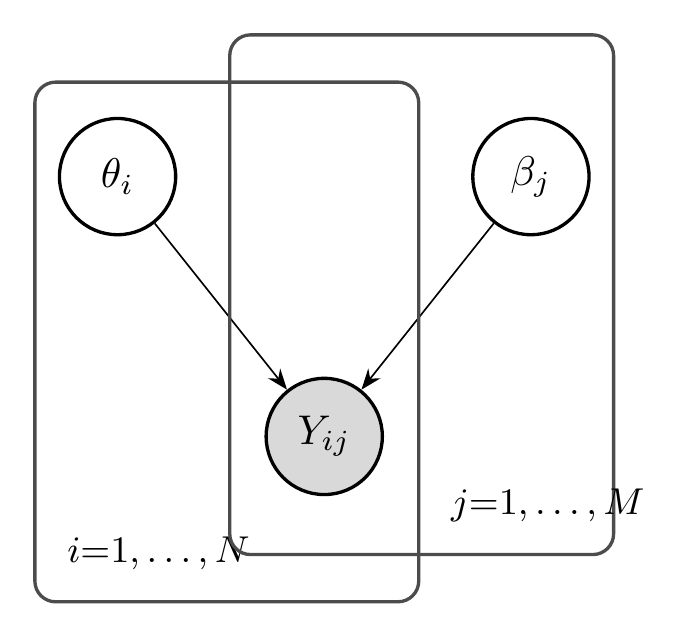
The simplest IRT model is the Rasch model, also called the one-parameter logistic (1PL) model:
\[ P(Y_{ij} = 1 | \theta_i, \beta_j) = \frac{\exp(\theta_i - \beta_j)}{1 + \exp(\theta_i - \beta_j)} = \sigma(\theta_i - \beta_j) \]
where:
- \(\theta_i \in \mathbb{R}\) is the ability of person \(i\)
- \(\beta_j \in \mathbb{R}\) is the difficulty of item \(j\)
- \(\sigma(\cdot)\) is the logistic sigmoid function
In the Rasch model, the probability of success depends only on the difference between ability and difficulty. When \(\theta_i = \beta_j\), the probability is exactly 0.5—the person has a 50% chance of answering correctly. When \(\theta_i > \beta_j\), the probability exceeds 0.5; when \(\theta_i < \beta_j\), it falls below 0.5.
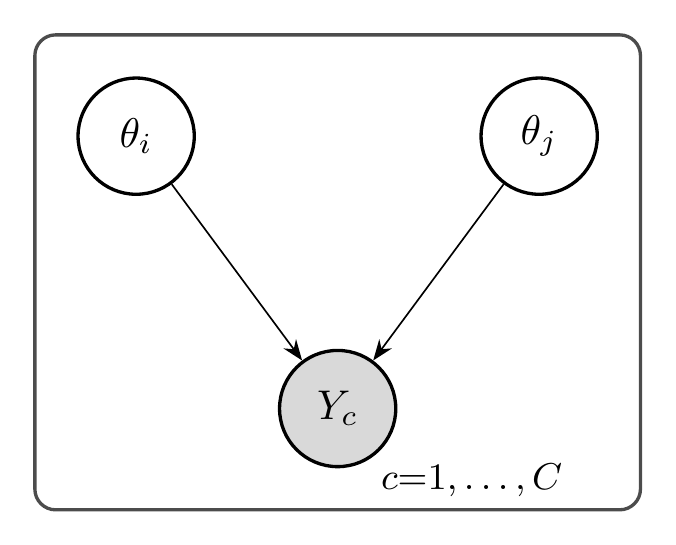
Throughout this chapter we use plate diagrams (also called plate notation) to visualize probabilistic models. The conventions are:
- Shaded (gray) nodes represent observed variables (e.g., responses \(Y_{ij}\)).
- Open (white) nodes represent latent (unobserved) variables or parameters (e.g., ability \(\theta_i\)).
- Arrows indicate probabilistic dependencies: an arrow from \(A\) to \(B\) means \(B\)’s distribution depends on \(A\).
- Plates (rectangles) indicate replication: a plate labeled “\(i = 1, \ldots, N\)” means the enclosed variables are repeated \(N\) times, once per index \(i\).
Nested plates represent crossed or hierarchical structure. For example, the response \(Y_{ij}\) sits inside both the person plate (\(i\)) and the item plate (\(j\)), indicating one observation per person-item pair. For a comprehensive treatment of graphical models, see Koller and Friedman (2009).
The function \(P(\theta) = \sigma(\theta - \beta)\) is called the Item Characteristic Curve (ICC). It describes how the probability of success changes with ability for a fixed item.
3.2.1.1 Local Independence
The Rasch model (and every other IRT and factor model in this chapter) specifies a probability for a single response \(Y_{ij}\). To make the jump from per-item probabilities to a joint distribution over a person’s entire response vector, we need an additional modeling assumption.
Local independence states that, given the latent parameters, responses are conditionally independent:
\[ P(Y_{i1}, \ldots, Y_{iM} \mid \theta_i, \beta) = \prod_{j=1}^M P(Y_{ij} \mid \theta_i, \beta_j). \]
All systematic co-variation across a person’s responses should be absorbed into the ability \(\theta_i\), leaving only item-specific noise. This is what lets us multiply per-item probabilities into a tractable likelihood in Section 4.2.1.
When do we expect it to hold? When \(\theta_i\) genuinely captures the single construct driving performance on every item, so that what is left between items is unrelated noise. For a well-designed unidimensional test, this is a reasonable first approximation.
When does it fail? Several things routinely break it in practice:
- Shared context (testlet effects). Multiple questions on the same reading passage, dataset split, or few-shot prompt template share information that \(\theta_i\) does not model.
- Item chaining. Later items leak answers to earlier ones, or solving \(j\) depends on the technique used in \(k\).
- Training contamination. For AI evaluation, items scraped from the web may appear in a model’s training data; correlated memorization looks like an extra latent factor.
- Multidimensionality. If the test actually measures several skills, a single \(\theta_i\) leaves residual item-item dependence that only a multidimensional model can remove.
Local independence is testable: fit the model, then check residual correlations between item pairs. Persistent residuals are a signal to enrich the model—with more factors or testlet/bifactor structure (Section 3.2.7)—rather than a reason to ignore the violation.
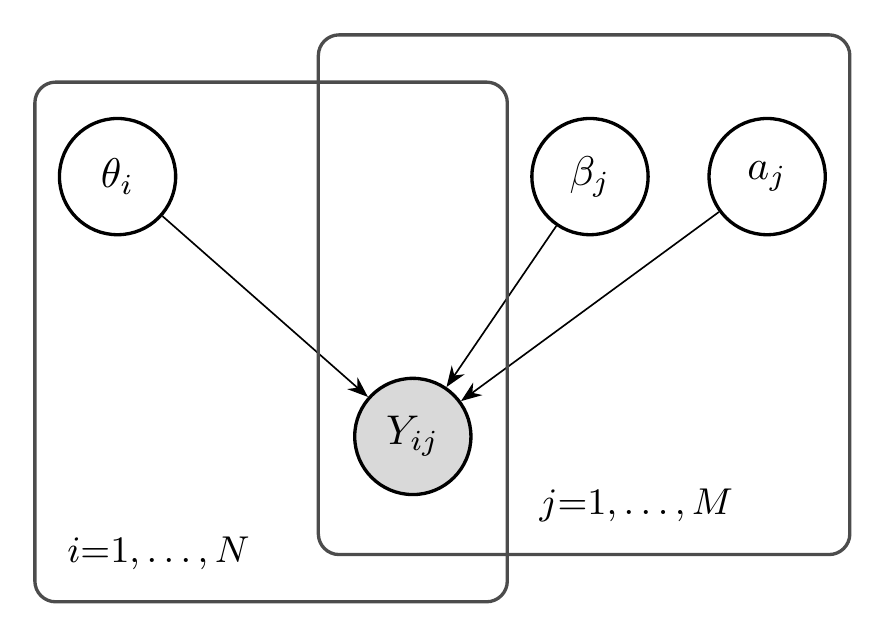
3.2.1.2 The Two-Parameter Logistic Model (2PL)
The Rasch model assumes all items have the same discrimination—the same slope of the ICC. The two-parameter logistic model relaxes this assumption:
\[ P(Y_{ij} = 1 | \theta_i, a_j, \beta_j) = \sigma(a_j(\theta_i - \beta_j)) \]
where \(a_j > 0\) is the discrimination parameter for item \(j\).
Items with higher discrimination are better at distinguishing between persons of different abilities. Their ICCs are steeper, meaning small changes in ability produce large changes in response probability.
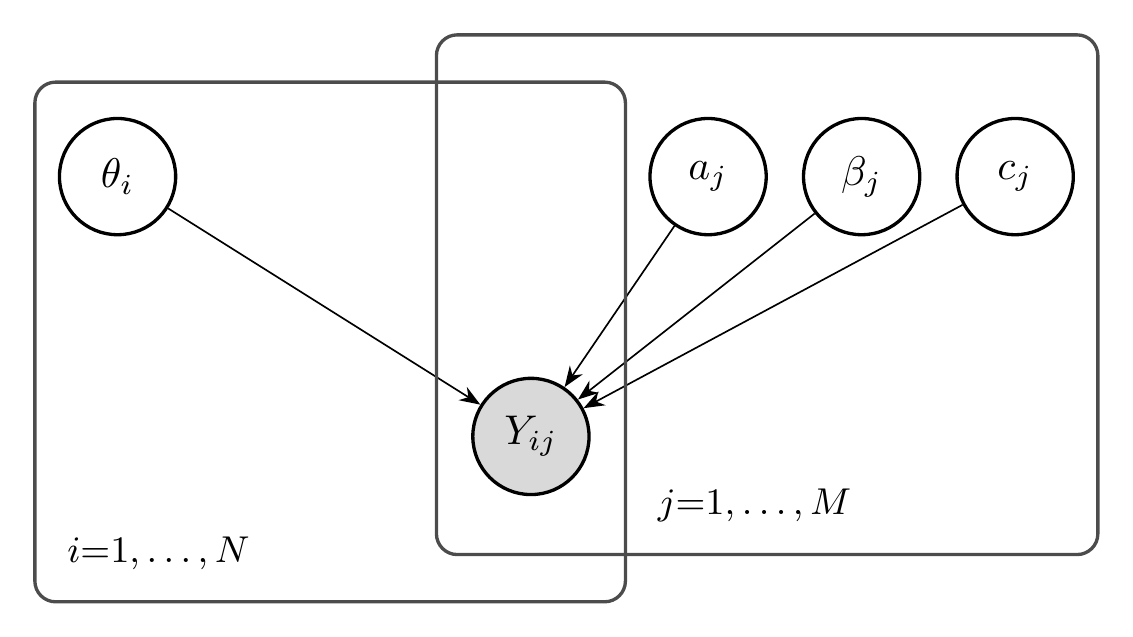
3.2.1.3 The Three-Parameter Logistic Model (3PL)
For multiple-choice tests, even low-ability test-takers may answer correctly by guessing. The three-parameter logistic model adds a lower asymptote:
\[ P(Y_{ij} = 1 | \theta_i, a_j, \beta_j, c_j) = c_j + (1 - c_j) \sigma(a_j(\theta_i - \beta_j)) \]
where \(c_j \in [0, 1]\) is the guessing (or pseudo-chance) parameter.
For a 4-option multiple-choice item, we might expect \(c_j \approx 0.25\) if low-ability test-takers guess randomly.
3.2.2 Nonparametric Item Response Theory
The Rasch, 2PL, and 3PL models all commit to a logistic shape for the item response function. Often we want to assume less. What if we only require that more able models are more likely to succeed—without fixing the curve’s form? Nonparametric item response theory (Mokken 1971), or Mokken scaling, asks exactly this, and it is a natural baseline for AI benchmarks whose item curves we have no reason to believe are logistic.
The monotone homogeneity model (MHM) keeps three assumptions and drops the rest:
- Unidimensionality — a single latent ability \(\theta\).
- Local independence — responses are conditionally independent given \(\theta\) (Section 3.2.1.1).
- Monotonicity — each item response function \(P_j(\theta) = P(Y_{\cdot j} = 1 \mid \theta)\) is non-decreasing in \(\theta\).
No logistic form, no difficulty or discrimination parameters. Remarkably, these three suffice to justify the practice the whole field relies on: under the MHM the sum score stochastically orders models on \(\theta\), so ranking models by accuracy is valid even when no parametric model fits. Adding a fourth assumption—non-intersecting item response functions, the double monotonicity model—yields an invariant item ordering: items rank by difficulty the same way at every ability level, the nonparametric echo of Rasch’s specific objectivity (Section 3.3).
Scalability coefficients. How well a set of items conforms to such a scale is measured by counting Guttman errors—a model passing a hard item but failing an easier one. For a pair of items, \(H_{jk} = \mathrm{Cov}(Y_{\cdot j}, Y_{\cdot k}) / \mathrm{Cov}_{\max}\), where \(\mathrm{Cov}_{\max}\) is the largest covariance the marginals allow; the item coefficient \(H_j\) aggregates this over all partners,
\[ H_j = \frac{\sum_{k \neq j} \mathrm{Cov}(Y_{\cdot j}, Y_{\cdot k})}{\sum_{k \neq j} \mathrm{Cov}_{\max}(Y_{\cdot j}, Y_{\cdot k})} . \tag{3.1}\]
Conventionally \(H_j < 0.3\) marks an unscalable item, \(0.3\)–\(0.5\) a weak-to-moderate scale, and \(> 0.5\) a strong one. A low or negative \(H_j\) flags an item that does not belong on the latent scale—exactly the signal S. T. Truong et al. (2025) use to find broken benchmark items: a flipped answer key makes an item anti-correlate with ability (\(H_j < 0\)), and a randomly answered question carries no scale information (\(H_j \approx 0\)).
Nonparametric IRT thus sits at the least-committal end of the modeling dial: Rasch fixes the slope, the 2PL frees it per item, and Mokken assumes only that the curve runs the right way. The weaker the assumption, the more benchmarks satisfy it—and monotonicity is about the least one can ask of a measurement and still order models by score.
3.2.3 Factor Models
Factor models provide an alternative perspective on latent variable measurement. While IRT focuses on item-level response probabilities, factor models focus on the covariance structure of responses.
3.2.3.1 The Linear Factor Model
The classical linear factor model assumes observed variables are linear combinations of latent factors plus noise:
\[ X_j = \lambda_{j1} F_1 + \lambda_{j2} F_2 + \cdots + \lambda_{jK} F_K + \epsilon_j \]
where:
- \(X_j\) is the observed score on item \(j\)
- \(F_k\) are latent factors (abilities, traits)
- \(\lambda_{jk}\) are factor loadings
- \(\epsilon_j\) is item-specific error
In matrix notation: \(X = \Lambda F + \epsilon\), where \(\Lambda\) is the \(M \times K\) matrix of factor loadings.
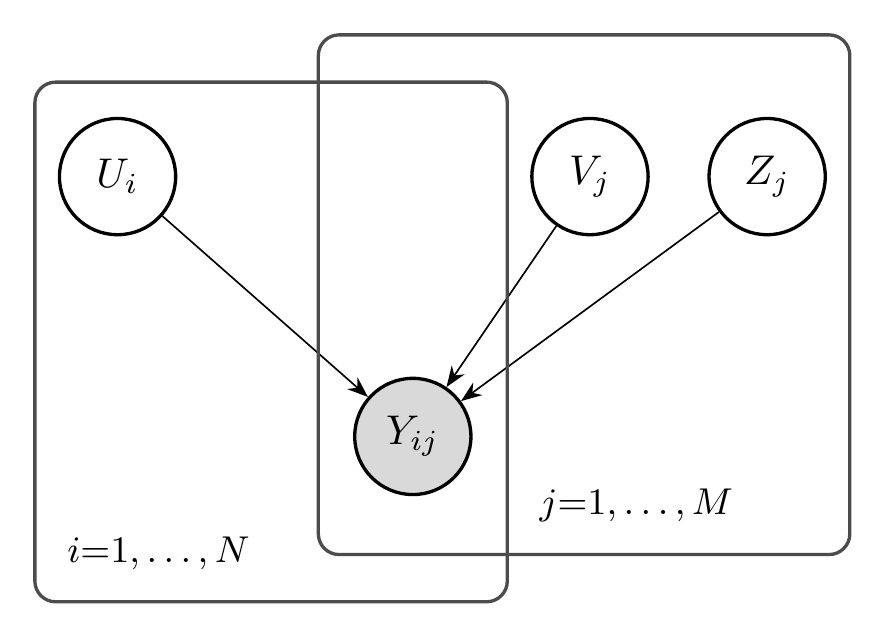
3.2.3.2 The Logistic Factor Model
For binary data, we use a logistic link function:
\[ P(Y_{ij} = 1 | U_i, V_j, Z_j) = \sigma(U_i^\top V_j + Z_j) \]
where:
- \(U_i \in \mathbb{R}^K\) is the latent factor vector for person \(i\)
- \(V_j \in \mathbb{R}^K\) is the factor loading vector for item \(j\)
- \(Z_j \in \mathbb{R}\) is the item intercept
The parameters of the logistic factor model correspond directly to those of the linear factor model:
| Linear Factor Model | Logistic Factor Model | Interpretation |
|---|---|---|
| Latent factors \(F_k\) | Entries of \(U_i \in \mathbb{R}^K\) | Abilities of person \(i\) on each of the \(K\) factors |
| Factor loadings \(\lambda_{jk}\) | Entries of \(V_j \in \mathbb{R}^K\) | How strongly item \(j\) loads on factor \(k\) |
| Item-specific error \(\epsilon_j\) | Item intercept \(Z_j \in \mathbb{R}\) | Baseline easiness of item \(j\) (analogous to \(-\beta_j\) in IRT) |
The key difference is the link function: the linear model uses an identity link (\(X_j = \ldots\)) for continuous responses, while the logistic model passes the linear predictor through the sigmoid \(\sigma(\cdot)\) to produce a probability for binary responses.
This is the model used in later chapters of AIMS for multidimensional AI evaluation.
3.2.3.3 Connection Between IRT and Factor Analysis
The Rasch model is equivalent to a one-factor logistic model with equal loadings:
The Rasch model \(P(Y_{ij} = 1) = \sigma(\theta_i - \beta_j)\) is equivalent to a single-factor logistic model with \(U_i = \theta_i\), \(V_j = 1\) for all \(j\), and \(Z_j = -\beta_j\).
More generally, multidimensional IRT models and logistic factor models are closely related, differing primarily in parameterization and estimation approach.
3.2.3.4 The Structure Matrix
After fitting a multidimensional factor model, we obtain estimated item loadings \(\hat{V}_j\) that describe how each item relates to the latent factors. However, raw factor loadings require standardization for interpretable comparisons across items and benchmarks.
The structure matrix \(S\) captures the correlation between each item’s latent response and each factor:
For a logistic factor model, the latent response \(Y^*_{ij}\) can be written as \(Y^*_{ij} = U_i^\top V_j + Z_j + \epsilon_{ij}\), where \(\epsilon_{ij}\) follows a logistic distribution with variance \(\pi^2/3\). The structure matrix entry \(S_{jk}\) is the correlation between item \(j\)’s latent response and factor \(k\):
\[ S_{jk} = \text{Cor}(Y^*_{ij}, U_{ik}) = \frac{(V_j^\top \Sigma)_k}{\sqrt{\Sigma_{kk}} \sqrt{V_j^\top \Sigma V_j + \pi^2/3}} \]
where \(\Sigma = \text{Cov}(U)\) is the factor covariance matrix.
Intuition. The formula for \(S_{jk}\) is just a Pearson correlation, built from the standard recipe
\[ \text{Cor}(A, B) = \frac{\text{Cov}(A, B)}{\text{SD}(A) \cdot \text{SD}(B)}, \]
applied to \(A = Y^*_{ij}\) and \(B = U_{ik}\). Reading the three pieces in turn:
Numerator — the covariance. Of the three terms in \(Y^*_{ij} = U_i^\top V_j + Z_j + \epsilon_{ij}\), only \(U_i^\top V_j\) depends on \(U\); the item difficulty \(Z_j\) and logistic noise \(\epsilon_{ij}\) are independent of \(U\) and drop out. This leaves \[ \text{Cov}(Y^*_{ij}, U_{ik}) = \text{Cov}(U_i^\top V_j,\, U_{ik}) = (V_j^\top \Sigma)_k. \]
Denominator — the two standard deviations. The factor has \(\text{SD}(U_{ik}) = \sqrt{\Sigma_{kk}}\), and the latent response has \[ \text{SD}(Y^*_{ij}) = \sqrt{\underbrace{V_j^\top \Sigma V_j}_{\text{from } U_i^\top V_j} + \underbrace{\pi^2/3}_{\text{from } \epsilon_{ij}}}, \] since \(Z_j\) is a constant offset and the logistic error contributes variance \(\pi^2/3\).
Why standardize. The resulting \(S_{jk} \in [-1, 1]\) is directly comparable across items, unlike the raw loadings \(V_j\), which depend on the arbitrary scale of the factors.
A detailed derivation is given in Chapter 4.
We define the structure vector for item \(j\) as \(S_j = (S_{j1}, S_{j2}, \ldots, S_{jK})^\top \in \mathbb{R}^K\), where each entry \(S_{jk}\) is given by the formula above. Stacking these row vectors yields the \(M \times K\) structure matrix \(S\), whose \(j\)-th row is \(S_j^\top\). The structure vector \(S_j\) serves as a standardized fingerprint of item \(j\): it tells us how strongly the item’s latent response correlates with each factor, on a \([-1, 1]\) scale that is comparable across items.
The structure matrix has several important properties:
- Bounded values: Each entry \(S_{jk} \in [-1, 1]\), making comparisons intuitive.
- Interpretability: High positive values indicate the item strongly measures that factor; negative values indicate inverse relationships.
- Clustering: Items with similar structure vectors measure similar constructs and can be grouped together.
For AI benchmarks, the structure matrix reveals which questions tap into which capabilities. Two questions may both be “correct/incorrect” but load on different factors—one measuring reasoning, another measuring factual recall. This has important implications for how we interpret aggregate benchmark scores.
3.2.3.5 Item Clustering and Benchmark Heterogeneity
With the structure matrix in hand, we can cluster items into latent subgroups using standard clustering algorithms such as Gaussian Mixture Models (GMM). Each cluster represents a group of items sharing similar factor loadings—analogous to “skills” or “themes” within the benchmark. This approach is analogous to exploratory factor analysis in psychometrics, revealing whether benchmarks are essentially unidimensional or composed of multiple, potentially antagonistic, latent skills.
A key insight from factor analysis applied to AI benchmarks is that benchmarks are rarely homogeneous. Intentionally or not, they often combine items that test different capabilities, and even a single benchmark item may test a combination of capabilities.
Two models with identical mean scores may excel on different capability dimensions. For example, one model might be strong in reasoning but weak in factual recall, while another may have the reverse profile. When item clusters show weak or negative correlations with each other, the benchmark-level mean score becomes neither informative nor accurate about subgroup performance.
Within each benchmark, we can quantify inter-construct correlations by:
- Clustering items based on their structure vectors using GMM with BIC for model selection
- Computing cluster means for each model (average accuracy on items in each cluster)
- Correlating cluster means across models to assess construct overlap
Strongly positive inter-cluster correlations indicate overlapping constructs, while weak or negative correlations suggest distinct and possibly conflicting capabilities being aggregated by the benchmark’s mean score. This multidimensional pattern explains why two models with identical overall accuracies may excel on entirely different skill axes.
Factor models assign a feature vector to each item (the structure vector), allowing items to be clustered via standard algorithms. This helps interpret evaluation results that would otherwise be obscured by aggregate scores.
3.2.4 Amortized Models
The factor models introduced in Section 3.2.3 learn a latent parameter vector for each person (\(U_i\)) and each item (\(V_j\), \(Z_j\)) by optimizing over the observed response matrix. This works well when we have enough responses for every entity, but it has two limitations: (1) the number of parameters grows linearly with the number of persons and items, and (2) new persons or items that were not present during training have no learned representation. Amortized models address both limitations by replacing per-entity parameter optimization with a learned function that maps observable features to latent parameters.
In the standard factor model, each item \(j\) has its own learned parameters \(V_j\) and \(Z_j\). An amortized model instead learns a function \(f_\theta\) that predicts these parameters from item features:
\[ [\hat{V}_j, \hat{Z}_j] = f_\theta(x_j) \]
where \(x_j\) is a feature vector for item \(j\) (e.g., a text embedding of the question). Similarly, person parameters can be amortized via a function \(g_\phi\):
\[ \hat{U}_i = g_\phi(m_i) \]
where \(m_i\) is a feature vector for person \(i\) (e.g., model metadata such as parameter count, architecture family, and release date). The predicted correctness probability is then:
\[ \hat{P}_{ij} = \sigma(\hat{U}_i^\top \hat{V}_j + \hat{Z}_j) \]
The key advantage is that \(f_\theta\) and \(g_\phi\) generalize to new items and persons not seen during training, as long as their features are available.
Amortized measurement models are closely related to neural collaborative filtering (NCF), a family of methods from recommendation systems that use neural networks to model user-item interactions. In the recommender systems literature, the response matrix \(Y\) records user preferences (ratings, clicks); in our setting, it records model correctness. Both problems share the same structure: predicting missing entries of a sparse matrix.
Classical matrix factorization decomposes the response matrix as \(Y \approx U V^\top + Z\), which is exactly the logistic factor model from Section 3.2.3 without the sigmoid. NCF extends this by replacing the inner product \(U_i^\top V_j\) with a neural network \(h_\psi(U_i, V_j)\) that can learn non-linear interactions between person and item latent factors. In the measurement context, this corresponds to replacing the linear logit \(U_i^\top V_j + Z_j\) with a more flexible function:
\[ P(Y_{ij} = 1) = \sigma(h_\psi(U_i, V_j, Z_j)) \]
This increased flexibility can capture complex interaction patterns—for instance, a model that is strong on reasoning but specifically weak on multi-step arithmetic—that a linear factor model would need many dimensions to approximate. The cost is reduced interpretability: the latent factors no longer have a clean geometric interpretation as “ability axes.”
Neural collaborative filtering and amortized models address complementary problems. NCF uses neural networks to model the interaction between latent factors (replacing \(U_i^\top V_j\) with a learned function). Amortized models use neural networks to predict the latent factors from features (replacing per-entity \(U_i\), \(V_j\) with functions of observable features). The two ideas can be combined: use amortized encoders to produce latent factors, then a neural interaction function to produce predictions.
3.2.5 Preference Models
Not all measurement data comes in the form of item responses. In many settings, we observe pairwise comparisons: which of two items is preferred, which of two players wins. These settings require different models.
3.2.5.1 The Bradley-Terry Model
The Bradley-Terry model (1952) is the foundational model for paired comparisons:
\[ P(\text{item } i \text{ beats item } j) = \frac{\exp(\theta_i)}{\exp(\theta_i) + \exp(\theta_j)} = \sigma(\theta_i - \theta_j) \]
where \(\theta_i\) is the “strength” or “quality” of item \(i\).
The model has the same mathematical form as the Rasch model, but the interpretation differs: instead of a person answering an item, we have two items competing against each other.
3.2.5.2 Online Measurement Model
The Elo rating system, developed by Arpad Elo for chess ratings, is essentially a Bradley-Terry model with online updates:
After player \(i\) with rating \(R_i\) plays player \(j\) with rating \(R_j\), the ratings are updated:
\[ R_i^{\text{new}} = R_i + K(S_i - E_i) \]
where:
- \(S_i \in \{0, 0.5, 1\}\) is the actual outcome (loss, draw, win)
- \(E_i = \sigma((R_j - R_i)/400 \cdot \ln 10)\) is the expected outcome
- \(K\) is a learning rate parameter
The Elo system is widely used in competitive games and has been adopted for AI evaluation in settings like the Chatbot Arena, where humans compare model outputs pairwise.
3.2.5.3 Connection to AI Evaluation
The Chatbot Arena (LMSYS) uses Elo ratings to rank language models based on human preferences. When a user prefers model A’s response over model B’s, this is treated as a “win” for model A. The resulting ratings provide a preference-based complement to accuracy-based benchmarks.
The Chatbot Arena implements exactly the paradigm that L.L. Thurstone proposed in 1927: measuring psychological attributes through pairwise comparisons. Thurstone developed this method to scale attitudes, preferences, and other subjective quantities. A century later, the same mathematics underlies how we rank AI systems.
3.2.6 Network Models
The models discussed so far assume a common cause structure: latent variables cause observed responses. Network models propose an alternative: observed variables are directly connected to each other, and correlations arise from these connections rather than common latent causes.
3.2.6.1 The Gaussian Graphical Model (GGM)
For continuous data, the Gaussian Graphical Model represents conditional independence relationships:
Variables \(X = (X_1, \ldots, X_M)\) follow a multivariate normal distribution with precision matrix \(\Omega = \Sigma^{-1}\). The partial correlation between \(X_j\) and \(X_k\) given all other variables is:
\[ \rho_{jk \cdot \text{rest}} = -\frac{\Omega_{jk}}{\sqrt{\Omega_{jj} \Omega_{kk}}} \]
Two variables are conditionally independent if and only if \(\Omega_{jk} = 0\).
The GGM can be visualized as a network where nodes are variables and edges represent non-zero partial correlations.
3.2.6.2 The Ising Model
For binary data, the Ising model (borrowed from statistical physics) provides an analogous framework:
\[ P(Y = y) = \frac{1}{Z} \exp\left(\sum_j \tau_j y_j + \sum_{j < k} \omega_{jk} y_j y_k\right) \]
where:
- \(\tau_j\) are threshold parameters (similar to item difficulties)
- \(\omega_{jk}\) are interaction parameters (edge weights)
- \(Z\) is a normalizing constant
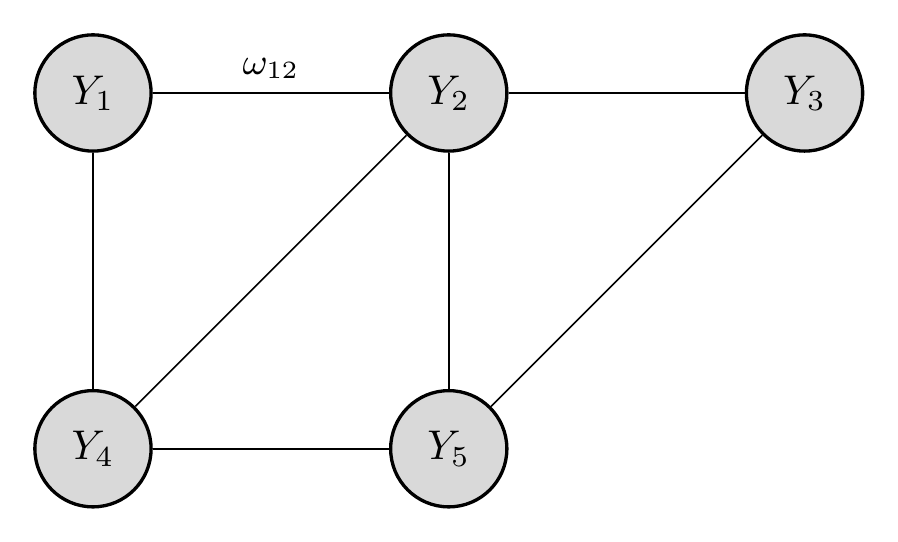
Interpreting the network. The Ising model defines a network (undirected graph) over items: each item \(j\) is a node, and each non-zero interaction weight \(\omega_{jk}\) is an edge between items \(j\) and \(k\). The network captures conditional dependencies: \(\omega_{jk} \neq 0\) means that knowing the response to item \(j\) changes the probability of a correct response to item \(k\), even after conditioning on all other items.
The two sums in the probability have distinct roles:
- \(\sum_j \tau_j y_j\) is the node term: each item \(j\) has a threshold \(\tau_j\) that plays a role analogous to item difficulty. A large positive \(\tau_j\) makes \(y_j = 1\) (correct) more probable, independent of other items.
- \(\sum_{j < k} \omega_{jk} y_j y_k\) is the edge term: it sums the interaction weights over all pairs of items that are both answered correctly. A positive weight \(\omega_{jk} > 0\) means items \(j\) and \(k\) tend to be answered correctly together (e.g., they share a common skill), while \(\omega_{jk} < 0\) means success on one is associated with failure on the other (e.g., they require competing strategies). The total edge sum captures the overall “alignment” of the response pattern with the dependency structure.
In the Ising model, the correlation between two items arises from their direct connection \(\omega_{jk}\), not from a common latent factor. Moreover, correlations can propagate through chains of connections: items \(j\) and \(k\) may be correlated even if \(\omega_{jk} = 0\), provided there is a path of non-zero edges connecting them.
3.2.6.3 Network vs. Latent Variable Models
The choice between network and latent variable models reflects different theories about what causes observed correlations:
| Aspect | Latent Variable Model | Network Model |
|---|---|---|
| Cause of correlations | Common latent factor | Direct connections |
| Removing an item | No effect on other correlations | May reduce correlations |
| Theoretical commitment | Constructs exist and cause responses | Constructs are summaries |
| Example | “Intelligence” causes good performance | Skills directly cause each other |
For AI evaluation, the question is whether benchmark items are indicators of a common capability (latent variable view) or whether they form a network of related but distinct skills (network view). This distinction has implications for how we aggregate performance across items.
The choice between latent variable and network models is not merely technical—it reflects different beliefs about AI capabilities:
- Latent variable view: Models have underlying capabilities (reasoning, knowledge, language understanding) that cause their benchmark performance.
- Network view: Benchmark items measure distinct skills that may reinforce each other but do not share a common cause.
Both views may be partially correct. AIMS primarily adopts the latent variable view but acknowledges that some benchmark items may not fit this framework.
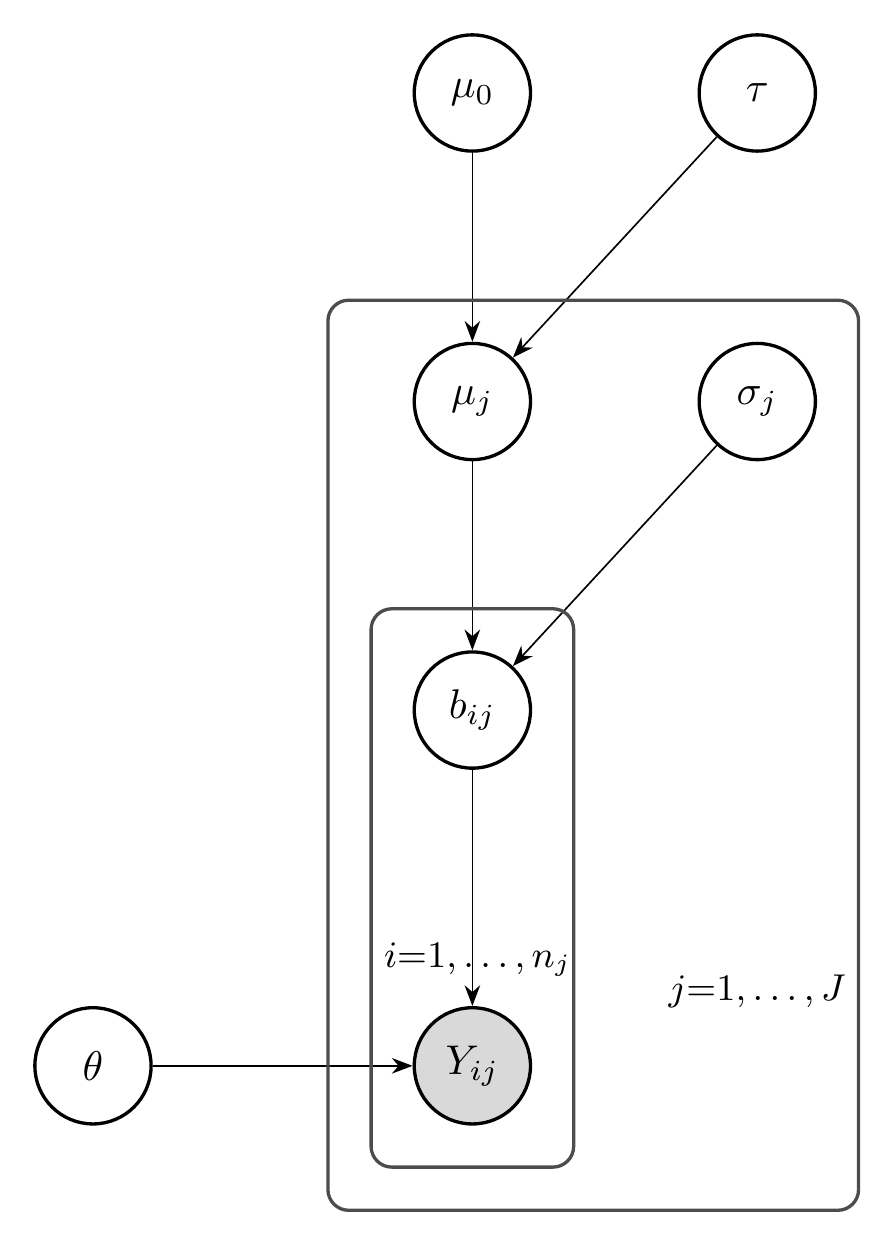
3.2.7 Hierarchical Models
The models introduced so far treat all items as exchangeable—a single set of item parameters enters the likelihood without any grouping structure. In practice, AI evaluations are nested: items belong to benchmarks, benchmarks belong to suites or domains, and suites may be grouped into broader capability areas. Hierarchical (multilevel) models make this nesting explicit in the model specification, treating it as part of the data-generating process rather than an afterthought of analysis.
Consider item \(i\) nested within benchmark \(j\). A hierarchical extension of the Rasch model specifies:
\[ \text{logit}\, P(Y_{ij} = 1 \mid \theta, b_{ij}) = \theta - b_{ij} \]
where item difficulties are drawn from a benchmark-level distribution:
\[ b_{ij} \sim \mathcal{N}(\mu_j, \sigma_j^2) \]
The benchmark means \(\mu_j\) may themselves follow a domain-level distribution \(\mu_j \sim \mathcal{N}(\mu_0, \tau^2)\), creating a three-level hierarchy: items within benchmarks within domains. The same hierarchical extension applies to 2PL, 3PL, and factor models.
The decision to include hierarchical structure is a modeling choice, analogous to the decision between the 1PL and 2PL. It encodes the assumption that items within the same benchmark share difficulty characteristics—their parameters are not independent draws from a single global distribution, but cluster by benchmark. Ignoring this structure and treating all items as exchangeable conflates within-benchmark and between-benchmark variation, producing estimates that may not generalize beyond the specific items observed (Luettgau et al. 2025).
Modern AI evaluations exhibit natural hierarchy at multiple levels:
- MMLU: 15,908 items \(\to\) 57 subjects \(\to\) 4 domains (humanities, social sciences, STEM, other)
- GAIA: agentic tasks \(\to\) 3 difficulty levels \(\to\) capability domain
- Coding benchmarks: problems \(\to\) benchmarks (HumanEval, MBPP, DS-1000) \(\to\) coding capability
Explicitly modeling these levels separates the sources of variation at each level. This enables principled generalization from the benchmarks actually tested to the broader construct they are intended to measure. Estimation methods for hierarchical models, including partial pooling and Bayesian inference, are covered in Chapter 4.
3.3 Measurement Model
Among the many probabilistic models for measurement, the Rasch model holds a special status. Georg Rasch and his followers argue that it is not merely one measurement model among many—it is the measurement model, the only model that satisfies the requirements for fundamental measurement. This section examines this claim carefully.
The most remarkable property of the Rasch model is that the sum score is a sufficient statistic for the ability parameter. This means that the total number of correct responses contains all the information about a person’s ability; knowing which items were answered correctly adds nothing.
In the Rasch model, the total score \(S_i = \sum_{j=1}^M Y_{ij}\) is a sufficient statistic for the ability parameter \(\theta_i\). That is:
\[ P(Y_i | S_i, \theta_i) = P(Y_i | S_i) \]
The conditional distribution of the response pattern given the sum score does not depend on \(\theta\).
The joint probability of response pattern \(Y_i = (Y_{i1}, \ldots, Y_{iM})\) is:
\[ P(Y_i | \theta_i, \boldsymbol{\beta}) = \prod_{j=1}^M \frac{\exp(Y_{ij}(\theta_i - \beta_j))}{1 + \exp(\theta_i - \beta_j)} \]
Expanding:
\[ = \frac{\exp(\theta_i \sum_j Y_{ij}) \cdot \exp(-\sum_j Y_{ij} \beta_j)}{\prod_j (1 + \exp(\theta_i - \beta_j))} \]
\[ = \frac{\exp(\theta_i S_i) \cdot \exp(-\sum_j Y_{ij} \beta_j)}{\prod_j (1 + \exp(\theta_i - \beta_j))} \]
The likelihood factors as \(L(\theta | Y) = g(S, \theta) \cdot h(Y, \boldsymbol{\beta})\), where \(g\) depends on \(\theta\) only through \(S\).
By the factorization theorem, \(S\) is sufficient for \(\theta\).
To see that the conditional distribution \(P(Y_i | S_i)\) does not depend on \(\theta\):
\[ P(Y_i | S_i, \theta_i) = \frac{P(Y_i | \theta_i, \boldsymbol{\beta})}{P(S_i | \theta_i, \boldsymbol{\beta})} \]
Both numerator and denominator contain the factor \(\exp(\theta_i S_i)\), which cancels when \(S_i\) is fixed.
Sufficiency has the following implications:
Data reduction without information loss. We can summarize each person’s responses by a single number (the sum score) without losing any information about their ability.
Justification for sum scores. The common practice of computing total scores is justified only if the Rasch model holds. Under other models, sum scores discard information.
Conditional inference. We can estimate item parameters without knowing person parameters, and vice versa, by conditioning on sufficient statistics.
When we compute a model’s accuracy on a benchmark, we are computing a sum score (proportion correct = sum / number of items). This is appropriate if the Rasch model holds. But if items have different discriminations, the sum score loses information—we should weight some items more than others.
Implication: Before trusting aggregate benchmark scores, we should test whether the Rasch model fits the data.
S. T. Truong et al. (2025) turn the sufficiency property into a practical diagnostic tool. Their argument: if the AI evaluation community reports mean scores as the primary metric, it is implicitly assuming that the sum score is a sufficient statistic for ability — which, by the theorem above, implies the Rasch model is the data-generating process. Under the Rasch model, two testable consequences follow:
- Positive tetrachoric correlations. All inter-item tetrachoric correlations must be non-negative (Corollary of Chebyshev’s inequality applied to increasing functions of the same latent variable \(\theta\)).
- Positive item-total correlations. Each item must correlate positively with the total score.
Items that violate these conditions — negative tetrachoric correlations, negative item-total correlations, or low Mokken scalability coefficients — are flagged as potentially invalid. Applying this to nine benchmarks including GSM8K and MMLU, S. T. Truong et al. (2025) achieve up to 84% precision at the top-50 flagged items: of the 50 most suspicious questions, up to 42 were confirmed invalid by human experts. Common errors include ambiguous wording, incorrect answer keys (e.g., treating exponential depreciation as linear), grading bugs (e.g., “$7.00” \(\neq\) “7”), and culturally-embedded assumptions.
This illustrates a broader principle: the mathematical properties of measurement models are not merely theoretical — they yield operational diagnostics for evaluation quality. When data violate model predictions, either the model is wrong or the data are corrupted. Since the sufficiency assumption is already implicit in how the community uses benchmarks, violations are strong evidence of item-level problems.
To see the diagnostic in action, plant eight defective items in a simulated Rasch benchmark—four with flipped answer keys, four answered at random—and rank every item by its item–total correlation (its correlation with the rest of the test). Sound items show the positive manifold; the defects fall to the bottom.
The defective items fall to the bottom, and flagging the lowest-correlation items recovers all eight. In practice the flagged items should be inspected rather than deleted blindly, since a low correlation can also mark a genuinely multidimensional skill rather than an error.
Georg Rasch’s central contribution was not the mathematical model itself (which had been proposed earlier by others) but the philosophical framework of specific objectivity.
A measurement procedure exhibits specific objectivity if comparisons between persons are independent of which items are used:
\[ \frac{P(Y_{ij} = 1)}{P(Y_{ij} = 0)} \bigg/ \frac{P(Y_{kj} = 1)}{P(Y_{kj} = 0)} = \frac{\exp(\theta_i)}{\exp(\theta_k)} \]
The item parameter \(\beta_j\) cancels completely. Similarly, comparisons between items are independent of which persons are used.
In the Rasch model, the odds ratio for two persons on the same item is:
\[ \frac{P(Y_{ij} = 1) / P(Y_{ij} = 0)}{P(Y_{kj} = 1) / P(Y_{kj} = 0)} = \frac{\exp(\theta_i - \beta_j)}{\exp(\theta_k - \beta_j)} = \exp(\theta_i - \theta_k) \]
The item difficulty \(\beta_j\) cancels! This means person comparisons are the same regardless of which item we use.
Rasch identified two levels of objectivity:
Local objectivity: Comparisons are item-independent for a specific pair of persons.
General objectivity: The entire ability scale is sample-independent. Ability estimates remain valid regardless of which items were administered.
Specific objectivity enables what Rasch called test-free person measurement and sample-free item calibration:
Test-free person measurement: A person’s ability can be estimated from any subset of calibrated items, and the estimate will be the same (within sampling error).
Sample-free item calibration: An item’s difficulty can be estimated from any sample of persons, and the estimate will be the same.
This is remarkable because it mirrors the properties of physical measurement:
Consider measuring temperature with different thermometers:
- A mercury thermometer in New York should give the same reading as an alcohol thermometer in London for the same temperature.
- Calibrating a thermometer on hot water should yield parameters that work equally well for cold water.
The Rasch model claims the same properties for psychological measurement: calibrated tests yield the same ability estimates regardless of which specific items are used.
If AI benchmarks satisfy Rasch model assumptions:
Benchmark subset comparisons are valid. We can compare a model tested on MMLU subset A with a model tested on MMLU subset B, as long as both subsets are calibrated to the same scale.
New questions can be calibrated on any models. We can add new questions to a benchmark by testing them on a sample of models, then use them to evaluate future models.
Adaptive testing becomes possible. We can select questions dynamically based on a model’s performance, arriving at an accurate ability estimate with fewer questions.
Cross-benchmark comparisons may be possible. If different benchmarks measure the same construct, we can equate their scales.
These properties are not guaranteed—they hold only if the Rasch model fits the data. Testing model fit becomes essential.
The claim that Rasch is “the” measurement model is controversial. The debate centers on the prescriptive vs. descriptive approaches to measurement.
3.3.0.1 The Prescriptive Approach (Rasch School)
The Rasch school argues:
Measurement requires specific objectivity. Without it, we cannot make person comparisons that are independent of the test used.
The model is a requirement, not a description. If data do not fit the Rasch model, the items do not measure the same construct. We should discard misfitting items, not adopt a more complex model.
Discrimination variation is a problem, not a feature. Items with different discriminations measure the construct with different precision. Mixing them produces a heterogeneous test that does not measure a single thing.
Sufficiency is non-negotiable. The sum score must be sufficient for ability, or we are not measuring anything meaningful.
3.3.0.2 The Descriptive Approach (General IRT)
The general IRT school responds:
Models should fit data. The purpose of a statistical model is to describe the data accurately. If items have different discriminations, we should model this, not ignore it.
Perfect fit is unrealistic. Real data never perfectly fit any model. The Rasch school’s insistence on exact fit is impractical.
Information is lost by forcing Rasch. Discarding items that don’t fit Rasch means discarding information. Better to use all items and model their characteristics.
2PL/3PL models are more realistic. Most tests have items with varying discrimination and guessing. Pretending otherwise does not make it true.
Prescriptive view: The Rasch model defines what measurement IS. Items that don’t fit should be discarded because they don’t measure the same thing.
Descriptive view: Use whatever model fits the data best. The 2PL/3PL models are more realistic for most applications.
This is not merely a statistical disagreement—it reflects different philosophies of science. The Rasch school treats measurement theory as providing requirements that data must satisfy. The IRT school treats models as tools that should be chosen based on fit.
3.3.0.3 Implications for AI Evaluation
This debate has direct implications for AI benchmark design:
| Question | Rasch School Answer | General IRT Answer |
|---|---|---|
| Should we allow items with different discriminations? | No—they measure different constructs | Yes—model the discrimination |
| What if data don’t fit Rasch? | Remove misfitting items | Use 2PL or 3PL |
| Is sum score the right metric? | Yes, if Rasch fits | Only approximately |
| Can we compare models across benchmarks? | Yes, with Rasch | Requires complex equating |
AIMS takes a pragmatic position: we test whether data fit Rasch-like models, use the simpler model when it fits adequately, and acknowledge when more complex models are needed. The key insight is that the choice has consequences for what we can conclude from evaluation results.
3.4 Historical Development
The probabilistic models we use today emerged from over a century of work across psychology, education, economics, and statistics. Understanding this history illuminates why certain models dominate and what problems they were designed to solve.
The story begins with L.L. Thurstone at the University of Chicago. In 1927, Thurstone proposed a model for how people make pairwise comparisons: the Law of Comparative Judgment (Thurstone 1927). Thurstone’s insight was that subjective quantities (preferences, attitudes, perceived stimuli) could be placed on a numerical scale by analyzing patterns of pairwise comparisons. If we ask many people whether stimulus A is greater than stimulus B, and record the proportion who say yes, we can infer the underlying scale values.
Each stimulus \(i\) has a true scale value \(\theta_i\). When comparing stimuli \(i\) and \(j\), each is perceived with Gaussian noise:
\[ \tilde{\theta}_i \sim \mathcal{N}(\theta_i, \sigma^2), \quad \tilde{\theta}_j \sim \mathcal{N}(\theta_j, \sigma^2) \]
The probability that \(i\) is judged greater than \(j\) is:
\[ P(i \succ j) = \Phi\left(\frac{\theta_i - \theta_j}{\sqrt{2}\sigma}\right) \]
where \(\Phi\) is the standard normal CDF.
Thurstone’s method was revolutionary: it showed that subjective quantities could be measured scientifically. The same mathematics now underlies how we rank AI systems from human preferences.
In 1952, Ralph Bradley and Milton Terry developed a model for ranking from paired comparisons in the context of incomplete block designs (Bradley and Terry 1952). Their model:
\[ P(i \succ j) = \frac{\pi_i}{\pi_i + \pi_j} \]
where \(\pi_i > 0\) are “worth” parameters. With \(\theta_i = \log \pi_i\), this becomes the familiar logistic form.
In 1959, R. Duncan Luce provided an axiomatic foundation through his Choice Axiom: the ratio of choice probabilities for two alternatives should be independent of what other alternatives are available. This axiom leads directly to the Bradley-Terry/logistic model.
Georg Rasch was a Danish mathematician who worked on problems in educational testing. In 1960, he published “Probabilistic Models for Some Intelligence and Attainment Tests,” which introduced what we now call the Rasch model (Rasch 1960).
Rasch’s contribution was not the mathematical model itself—the same formula had appeared earlier in other contexts. His contribution was the philosophical framework of specific objectivity: the requirement that person and item parameters must be separable.
Rasch’s work was introduced to the United States by Benjamin Wright at the University of Chicago, who heard Rasch lecture in 1960. Wright became the leading advocate for Rasch measurement in the English-speaking world, founding the MESA (Measurement, Evaluation, Statistical Analysis) program and the journal Rasch Measurement Transactions.
Other important figures in the Rasch tradition:
- Erling Andersen (Copenhagen): Developed the theory of conditional maximum likelihood estimation for Rasch models.
- Gerhard Fischer (Vienna): Extended the Rasch model to the Linear Logistic Test Model (LLTM) and developed software for estimation.
- David Andrich (Australia): Extended Rasch models to polytomous data (rating scales) and developed the RUMM software.
In 1974, Daniel McFadden (who later won the Nobel Prize in Economics) developed the random utility framework for discrete choice. His insight was that choices could be modeled as utility maximization with random error:
A person chooses alternative \(i\) over \(j\) if \(U_i + \epsilon_i > U_j + \epsilon_j\), where \(U\) is deterministic utility and \(\epsilon\) is random. If the errors are i.i.d. Gumbel distributed, this yields the logistic choice model (McFadden 1974).
McFadden’s work connected preference models to economics and provided a theoretical justification for the Bradley-Terry model: it arises from random utility maximization under specific distributional assumptions.
Modern Developments
Network Psychometrics (2010s): Borsboom and colleagues proposed that psychological constructs might be better understood as networks of causally connected symptoms rather than reflections of underlying latent variables (Borsboom and Cramer 2013). The Ising model and Gaussian Graphical Model provide statistical tools for this perspective.
AI Evaluation (2020s): The application of psychometric methods to AI evaluation is recent. Key developments include:
- Chatbot Arena using Elo ratings for LLM ranking (Chiang et al. 2024)
- Application of IRT to benchmark analysis (Polo et al. 2024)
- Multidimensional factor models for AI capabilities (this textbook)
Foundations:
- Thurstone (1927) . A law of comparative judgment. Psychological Review, 34, 273-286.
- Bradley and Terry (1952) . Rank analysis of incomplete block designs. Biometrika, 39, 324-345.
- Luce (1959) . Individual Choice Behavior: A Theoretical Analysis. Wiley.
- Rasch (1960) . Probabilistic Models for Some Intelligence and Attainment Tests. Danish Institute for Educational Research.
- McFadden (1974) . Conditional logit analysis of qualitative choice behavior. In Frontiers in Econometrics (pp. 105-142). Academic Press.
Modern:
3.5 From Psychology to AI: Transferring Measurement Science
The concepts developed in psychology and education transfer directly to AI evaluation. This section makes the mapping explicit and highlights both the parallels and the differences.
3.5.1 The Translation Table
| Psychology/Education | AI Evaluation | Symbol |
|---|---|---|
| Test taker (person, examinee) | AI model | \(i\) |
| Test item (question, problem) | Benchmark question | \(j\) |
| Ability, trait, latent construct | Capability, skill | \(\theta_i\) or \(U_i\) |
| Item difficulty | Question difficulty | \(\beta_j\) or \(V_j\) |
| Item discrimination | Question informativeness | \(a_j\) |
| Response (correct/incorrect) | Model output (correct/incorrect) | \(Y_{ij}\) |
| Test (collection of items) | Benchmark (collection of questions) | - |
| Sum score (number correct) | Accuracy | \(S_i\) |
| Reliability | Evaluation consistency | - |
| Validity | Measuring intended capability | - |
| Test bias (DIF) | Benchmark contamination/bias | - |
| Adaptive testing (CAT) | Efficient evaluation | - |
3.5.2 Key Parallels
Reliability. In educational testing, reliability refers to the consistency of scores across different conditions:
- Test-retest reliability: Does the same person get the same score on repeated testing?
- Internal consistency: Do items within the test correlate with each other?
- Standard error of measurement: How precise is the score estimate?
For AI evaluation:
- Run-to-run consistency: Does the same model get the same score with different random seeds?
- Item consistency: Do benchmark questions correlate with each other?
- Confidence intervals: How uncertain is the accuracy estimate?
Validity. In educational testing, validity concerns whether the test measures what it claims to measure:
- Content validity: Do the items adequately sample the domain?
- Criterion validity: Does the score predict relevant outcomes?
- Construct validity: Does the score behave as theory predicts?
For AI evaluation:
- Content validity: Does the benchmark cover the intended capability domain?
- Criterion validity: Does benchmark performance predict real-world usefulness?
- Construct validity: Do models that score high actually have the intended capability?
Fairness and Bias. In educational testing, differential item functioning (DIF) analysis checks whether items are biased against certain groups:
- An item shows DIF if persons with equal ability but different group membership have different probabilities of answering correctly.
For AI evaluation:
- Training data contamination: Did some models see the test questions during training?
- Architecture bias: Are some questions easier for certain model architectures?
- Prompt sensitivity: Do different prompt formats advantage different models?
3.5.3 Key Differences
While the mathematical framework transfers directly, some differences are worth noting:
Number of items. Psychological tests typically have tens to hundreds of items. AI benchmarks may have thousands or hundreds of thousands. This affects estimation and model fitting.
Deterministic responses. Human test-takers show stochastic variation—they may answer the same question differently on different occasions. AI models (with temperature 0) are often deterministic. This changes how we interpret probability models.
Construct definition. Psychological constructs like “intelligence” or “anxiety” have extensive theoretical literature. AI capabilities like “reasoning” or “common sense” are less well defined.
Speed of change. Human abilities change slowly. AI capabilities can change dramatically with each model release. This affects the stability of calibrations.
Population structure. Human populations have known demographic structures. The “population” of AI models is arbitrary—determined by which models researchers choose to evaluate.
3.5.4 Case Study: The Chatbot Arena
The Chatbot Arena (LMSYS) (Liang et al. 2023) provides a concrete example of measurement concepts applied to AI:
Setting: Users interact with two anonymous language models and vote for the one they prefer. Models are ranked using Elo ratings computed from these pairwise comparisons.
Measurement framework: This is exactly Thurstone’s comparative judgment paradigm from 1927. The Elo rating system implements Bradley-Terry maximum likelihood estimation with online updates.
Validity questions:
- What construct do the ratings measure? “Human preference” is vague. Preferences for what—helpfulness, harmlessness, style, factual accuracy?
- Are ratings stable across different user populations?
- Do ratings predict performance on other benchmarks or real-world tasks?
Reliability questions:
- How many comparisons are needed for stable ratings?
- How sensitive are ratings to the specific prompts used?
- Do ratings fluctuate as new models enter the arena?
The Arena demonstrates both the power and limitations of measurement approaches. The Elo ratings provide a principled summary of human preferences, but interpreting what they mean requires the full apparatus of validity theory.
3.6 Summary and Preview
This chapter has introduced the measurement science framework that underlies the rest of AIMS. The key ideas are:
3.6.1 Key Takeaways
Measurement requires more than scoring. Assigning numbers to models based on benchmark performance is scoring, not measuring. Measurement requires a theory connecting scores to latent constructs.
Validity matters. A benchmark measures a construct only if the construct exists and causally produces variation in scores. The philosophical and diagnostic foundations of validity are developed in Chapter 1.
The Rasch model has special properties. Sufficiency of sum scores and specific objectivity make Rasch uniquely suitable for fundamental measurement. These properties justify treating sum scores as measurements.
Multiple models exist for different purposes. IRT models (1PL, 2PL, 3PL), factor models, paired comparison models (Bradley-Terry, Elo), network models (GGM, Ising), and hierarchical models serve different purposes. The choice of model—including whether to represent nested evaluation structure—has implications for what we can conclude.
Psychology solved these problems decades ago. The tools developed in psychometrics—reliability, validity, dimensionality analysis, adaptive testing—apply directly to AI evaluation.
3.6.2 Preview of Following Chapters
The chapters that follow apply this framework to specific AI evaluation challenges:
Chapter 4 covers parameter estimation for IRT and factor models, including maximum likelihood, EM algorithms, Bayesian inference, regularization, and model selection. It also develops generalization experiments—evaluating how well learned models transfer to unseen data under various masking schemes—and presents empirical results for the amortized models introduced in this chapter.
Chapter 6 applies measurement principles to efficient benchmark design, addressing how to construct informative AI evaluations.
Chapter 5 develops the theory of measurement precision, including classical and IRT-based reliability, standard errors, and information functions.
The measurement concepts from this chapter recur throughout. When we justify using sum scores, we appeal to sufficiency in the Rasch sense. When we analyze benchmark dimensionality, we apply the factor models introduced in this chapter and trained using methods from Chapter 4. The question of whether benchmarks measure what they claim to measure — validity — is developed in Chapter 1.
3.7 Exercises
3.7.1 Theoretical Exercises
Exercise 1.1 (*): Explain why the sum score is a sufficient statistic in the Rasch model but not in the 2PL model. What information is lost when we reduce responses to sum scores under 2PL?
Exercise 1.2 (**): Prove that the Bradley-Terry model is equivalent to a Rasch model where each “person” is a comparison between two items.
Hint: Consider a “person” as an ordered pair \((i, j)\) representing a comparison, and an “item” as a single entity \(k\) appearing in a comparison. Define appropriate ability and difficulty parameters.
Exercise 1.3 (**): Show that in the Rasch model, the odds ratio for persons \(i\) and \(k\) responding correctly to item \(j\) is:
\[ \frac{P(Y_{ij} = 1) / P(Y_{ij} = 0)}{P(Y_{kj} = 1) / P(Y_{kj} = 0)} = \exp(\theta_i - \theta_k) \]
independent of the item difficulty \(\beta_j\). Explain why this property is called “specific objectivity.”
Exercise 1.4 (***): The Ising model and the Rasch model make different assumptions about why responses correlate.
Write down both models for binary data \(Y \in \{0, 1\}^{N \times M}\).
Describe the causal structure each model assumes.
Under what conditions might each model be appropriate for AI evaluation?
Propose an empirical test that could distinguish between them.
3.7.2 Computational Exercises
Exercise 1.5 (**): Implement Rasch model estimation using conditional maximum likelihood.
# Given: Response matrix Y (N models x M questions)
# Task: Estimate item difficulties using conditional MLE
#
# Steps:
# 1. Compute sum scores for each model
# 2. For each item, compute the conditional likelihood given sum scores
# 3. Optimize to find item difficulties
# 4. Compare estimated difficulties to empirical item means (proportion correct)
#
# Use scipy.optimize.minimize for optimization
import numpy as np
from scipy.optimize import minimize
from scipy.special import logsumexp
def estimate_rasch_conditional(Y):
"""
Estimate Rasch model item difficulties using conditional MLE.
Parameters:
-----------
Y : np.ndarray, shape (N, M)
Binary response matrix
Returns:
--------
beta : np.ndarray, shape (M,)
Estimated item difficulties (identified by setting sum(beta) = 0)
"""
N, M = Y.shape
# CODE HERE
pass
# Test on simulated data
np.random.seed(42)
N, M = 100, 50
theta_true = np.random.normal(0, 1, N)
beta_true = np.random.normal(0, 1, M)
prob = 1 / (1 + np.exp(-(theta_true[:, None] - beta_true[None, :])))
Y = (np.random.random((N, M)) < prob).astype(int)
beta_hat = estimate_rasch_conditional(Y)
# Compare to true values (after centering)Exercise 1.6 (**): Given pairwise preference data, estimate Bradley-Terry parameters.
# Given: Comparison data as list of (winner, loser) pairs
# Task: Estimate strength parameters via maximum likelihood
#
# The likelihood for comparison (i beats j) is:
# P(i > j) = exp(theta_i) / (exp(theta_i) + exp(theta_j))
# = sigmoid(theta_i - theta_j)
import numpy as np
from scipy.optimize import minimize
def estimate_bradley_terry(comparisons, n_items):
"""
Estimate Bradley-Terry model parameters.
Parameters:
-----------
comparisons : list of (int, int)
List of (winner, loser) pairs
n_items : int
Number of items
Returns:
--------
theta : np.ndarray, shape (n_items,)
Estimated strength parameters (identified by setting theta[0] = 0)
"""
# CODE HERE
pass
# Test: Simulate comparisons and recover parametersExercise 1.7 (***): Test whether benchmark data fit the Rasch model using Andersen’s likelihood ratio test.
# Andersen's LR test:
# 1. Split persons into groups based on sum score (e.g., high vs low scorers)
# 2. Estimate item difficulties separately for each group
# 3. If Rasch holds, these estimates should be equal
# 4. Test statistic: 2 * (sum of group log-likelihoods - pooled log-likelihood)
# 5. Under H0, this is chi-squared with df = (n_groups - 1) * (n_items - 1)
def andersen_lr_test(Y, n_groups=2):
"""
Perform Andersen's LR test for Rasch model fit.
Parameters:
-----------
Y : np.ndarray, shape (N, M)
Binary response matrix
n_groups : int
Number of groups to split persons into
Returns:
--------
statistic : float
LR test statistic
p_value : float
p-value from chi-squared distribution
"""
# CODE HERE
passExercise 1.8 (***): Implement the benchmark item-bug diagnostic of S. T. Truong et al. (2025).
# Simulate a Rasch benchmark with planted defective items, then rank items by
# three scalability diagnostics and measure how well each recovers the defects.
#
# Steps:
# 1. Simulate Y (N = 80 models x M = 200 items) from a Rasch model.
# 2. Plant 20 buggy items: 10 with flipped keys, 10 answered at random.
# 3. Rank items by (a) item-total correlation, (b) average tetrachoric
# correlation, and (c) Mokken H_j (@eq-mokken-h).
# 4. Report precision@20 and recall@20 for each ranking.
# 5. Repeat as the model pool grows from N = 10 to N = 100 and plot how
# detection quality scales with the number of test-takers.
import numpy as np
def detect_buggy_items(N, M, n_bad, seed=0):
"""Return precision@n_bad and recall@n_bad for each of the three diagnostics."""
# CODE HERE
pass3.7.3 Discussion Questions
Discussion 1.1: The Rasch model’s sufficiency property justifies using sum scores as measurements. But most AI benchmarks use items with varying discriminations, which violates the Rasch assumption. Does this mean that current benchmark rankings are fundamentally flawed, or can they still be useful approximations? Under what conditions would adopting Rasch-based measurement change the ranking of frontier models?
Discussion 1.2: The Rasch school argues that items not fitting the Rasch model should be discarded because they do not measure the same construct. What are the implications of this view for AI benchmark design? Should we design benchmarks to fit Rasch, or should we use more flexible models that accommodate heterogeneous items?
Discussion 1.3: Network psychometrics views symptoms as causally connected rather than caused by a latent factor. Could AI capabilities be “network-like” rather than “factor-like”? What evidence would distinguish these views? How would it change how we interpret benchmark scores?
Discussion 1.4: S. Truong et al. (2025) show that IRT ability \(\theta\) scales linearly with \(\log(\text{FLOP})\) during pre-training, and that this relationship enables cross-benchmark transfer of ability estimates. What does this imply about the nature of the latent construct \(\theta\)? Is it a stable property of the model, or an artifact of the IRT parameterization? Under what conditions would cross-benchmark transfer of \(\theta\) fail?
3.8 Bibliographic Notes
3.8.1 Item Response Theory
The standard reference for IRT is Lord and Novick’s Statistical Theories of Mental Test Scores (1968), though it predates modern computational methods. More accessible introductions include Hambleton and Swaminathan’s Item Response Theory (1985) and de Ayala’s The Theory and Practice of Item Response Theory (2009). The Handbook of Modern Item Response Theory (van der Linden & Hambleton, 1997) provides comprehensive coverage.
3.8.2 Rasch Measurement
Rasch’s original book Probabilistic Models for Some Intelligence and Attainment Tests (1960) remains influential. Wright and Stone’s Best Test Design (1979) provides practical guidance. Fischer and Molenaar’s Rasch Models: Foundations, Recent Developments, and Applications (1995) covers extensions and applications. For the philosophical foundations, see Rasch’s papers on objectivity collected in the Rasch Measurement Transactions archive.
3.8.3 Nonparametric IRT and Item Analysis
Nonparametric item response theory originates with Mokken (1971); the monotone and double-monotonicity models, scalability coefficients, and their estimation are developed in Sijtsma and Molenaar’s Introduction to Nonparametric Item Response Theory (2002). Classical item analysis—item–total correlations, inter-item (tetrachoric) correlations, and Mokken scalability coefficients to identify misfitting items—is a standard step in test development. S. T. Truong et al. (2025) apply these diagnostics to AI benchmarks at scale, showing that items flagged by negative tetrachoric correlations or low scalability coefficients frequently contain genuine errors (incorrect keys, ambiguous wording, grading bugs); their framework is grounded in the Rasch sufficiency property (Section 3.3), and they recommend evaluating with 60–80 LLMs from at least 10 organizations for reliable detection.
3.8.4 Historical Development
Thurstone’s seminal paper “A Law of Comparative Judgment” (1927) launched the quantitative study of preferences. Bradley and Terry’s “Rank Analysis of Incomplete Block Designs” (1952) and Luce’s Individual Choice Behavior (1959) established the axiomatic foundations. McFadden’s “Conditional Logit Analysis” (1974) connected these to economic theory. For a history of psychometrics, see Boring’s A History of Experimental Psychology (1950).
3.8.5 Probabilistic Graphical Models
This chapter uses plate diagrams and concepts from probabilistic graphical models (PGMs). Koller and Friedman (2009) provide a comprehensive reference covering directed and undirected graphical models, plate notation, and inference algorithms. Readers seeking deeper background on the graphical model foundations underlying IRT and network models will find Chapters 3–4 (Bayesian networks) and Chapter 5 (undirected models / Markov random fields) especially relevant.
3.8.6 Network Psychometrics
The network approach is developed in Borsboom and Cramer’s “Network Analysis: An Integrative Approach” (2013) and formalized in Epskamp et al.’s papers on the Gaussian graphical model and Ising model (2018). The Network Psychometrics with R book (Epskamp et al., 2022) provides practical guidance.
3.8.7 AI Evaluation
The application of psychometric methods to AI is recent. For IRT applied to LLMs, see Polo et al.’s “Efficient Multi-Prompt Evaluation” (2024). For factor models, see the methods developed in this textbook. The Chatbot Arena is described in Zheng et al.’s “Judging LLM-as-a-Judge” (2023).
3.8.8 Scaling Laws and IRT
S. Truong et al. (2025) introduce Item Response Scaling Laws (IRSL), which embed IRT within the scaling law framework. By factorizing model ability from question difficulty, IRSL reduces scaling law estimation from \(O(M \times N)\) to \(O(M + N)\) parameters, with the estimated ability transferring across benchmarks. Their Beta-IRT formulation models empirical probability responses (token probabilities, pass rates) rather than binary correctness, using a Beta loss that achieves reliable calibration with as few as 2 test takers. Schaeffer et al. (2025) provide the distributional theory explaining why per-problem exponential scaling aggregates to power-law scaling: the exponent is determined by the left-tail shape parameter of the success probability distribution, connecting the heterogeneity of item difficulty to aggregate scaling behavior.